Kubusvormige robotjes werken samen als mieren, onder andere om voorwerpen die fors groter zijn dan zichzelf op te pakken en te verplaatsen.
Steeds meer wetenschappers bestuderen de manier waarop robots gezamenlijke doelen kunnen bereiken. Ze inspireren zich daarvoor op de manier waarop mieren samenwerken om bijvoorbeeld een gat in een pad te overbruggen of om samen een vlot te vormen om overstromingen te overleven.
Wetenschappers van de Hanyang Universiteit in Seoul onder leiding van Jeong Jae Wie ontwikkelden zwermen van piepkleine magnetische robots die samenwerken om Hercules-achtige prestaties te leveren. Hoewel eerder onderzoek naar zwermrobots was gericht op bolvormige robots, ontwierp het team van Wie kubusvormige microrobots. Omdat die met grotere oppervlakken in contact kunnen komen met elkaar dan bolvormige, kunnen ze een sterkere magnetische aantrekkingskracht op elkaar uitoefenen.
Elke microrobot is 600 micrometer hoog en bestaat uit een epoxy lichaam met daarin ferromagnetische neodymium-ijzer-borium (NdFeB) deeltjes, waardoor het kan reageren op magnetische velden en kan communiceren met andere microrobots. Door de robots aan te drijven met een magnetisch veld dat wordt opgewekt door twee verbonden magneten te laten draaien, kan de zwerm zichzelf assembleren.
De onderzoekers programmeerden de robots om samen te komen in verschillende configuraties door de hoek te veranderen waaronder de robots werden gemagnetiseerd. Ze testten hoe goed zwermen van microrobots in verschillende configuraties presteerden bij verschillende taken.
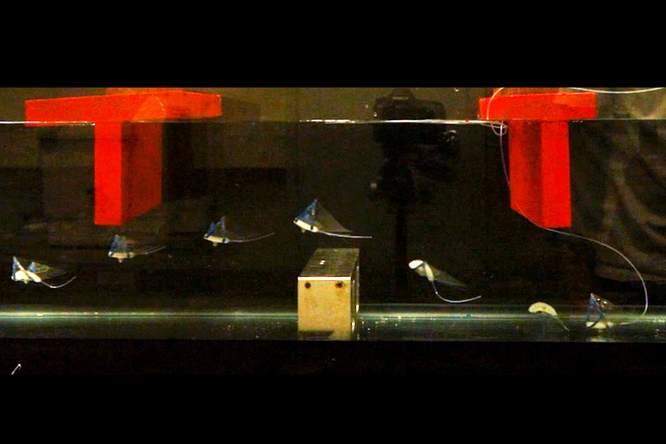
Ze ontdekten dat zwermen een obstakel konden beklimmen dat vijf keer hoger was dan de lichaamslengte van een van hen en dat ze zichzelf één voor één over een obstakel konden slingeren. Ze zagen ook dat een grote zwerm van 1.000 microrobots een vlot vormde dat op water dreef en zich om een pil wikkelde die 2.000 keer meer woog dan elke individuele robot, waardoor de zwerm het medicijn door de vloeistof kon transporteren.
Op het droge slaagde een robotzwerm erin om ladingen te vervoeren die 350 keer zwaarder waren dan elk individu afzonderlijk, terwijl een andere groep van microrobots in staat was om kleine buisjes, vergelijkbaar met slagaders, te ontstoppen. Verder ontwikkelde het team een systeem waarmee robotzwermen de bewegingen van kleine organismen konden sturen door middel van draaiende en slepende bewegingen.
Volgens de onderzoekers was het grote aanpassingsvermogen van de robotzwermen aan hun omgeving verrassend, net zoals het hoge autonomieniveau in de besturing ervan. Door samen te werken zijn de robots ook beter bestand tegen mislukkingen. Zelfs als sommige leden van de groep het doel niet halen, blijft de rest hun geprogrammeerde bewegingen uitvoeren tot er genoeg van hen slagen.
Uit het onderzoek blijkt dat de microrobots gebruikt kunnen worden om moeilijke taken uit te voeren in uitdagende omgevingen waar individuele robots moeite mee hebben. Denk bijvoorbeeld aan een minimaal invasieve behandeling om verstopte slagaders vrij te maken.
Maar hoewel de resultaten van het onderzoek veelbelovend zijn, hebben de zwermen volgens de onderzoekers een hoger niveau van autonomie nodig voordat ze klaar zijn voor echte toepassingen. De magnetische microrobotzwermen hebben nu nog externe magnetische controle nodig en zijn niet in staat om autonoom door complexe of beperkte ruimtes te navigeren, zoals echte slagaders. Toekomstig onderzoek zal zich richten op het verbeteren van dit autonomieniveau, zoals real-time feedbackcontrole van hun bewegingen en trajecten.